ZHCACC0A March 2023 – September 2023 MSPM0L1105 , MSPM0L1106 , MSPM0L1303 , MSPM0L1304 , MSPM0L1304-Q1 , MSPM0L1305 , MSPM0L1305-Q1 , MSPM0L1306 , MSPM0L1306-Q1 , MSPM0L1343 , MSPM0L1344 , MSPM0L1345 , MSPM0L1346
使用 MSPM0 MCU 为步进电机和有刷直流 (BDC) 电机实现优化的 H 桥驱动器控制
在现代世界中,许多米6体育平台手机版_好二三四都使用了电机。步进电机由于尺寸小、成本低、能够进行位置控制、使用方便、无累积误差等优点,广泛应用于滑轨、工作台、医疗机器和许多其他应用。有刷直流 (BDC) 电机由于具有良好的启动和速度性能,也广泛用于车床、起动机和电力机车。这两种电机在硬件上都采用了 H 桥结构来控制电机的转速和方向。MSPM0 MCU 凭借其丰富的米6体育平台手机版_好二三四系列和模拟功能以及针对有刷直流和步进控制优化的软件资源,可以充分发挥 H 桥结构的作用。
什么是用于步进电机和有刷直流电机的 H 桥驱动器?
有刷直流电机 (BDC) 是最易于驱动的电机类型。要运行 BDC 电机,需要在电机端子上施加电压以改变转子上的磁场并产生连续的旋转运动。尽管存在热耗散、高转子惯性和电磁干扰等缺点,但有刷直流电机不需要电流反馈且易于控制,因此适用于许多应用。
步进电机使用一系列电磁体工作,这些电磁体交替打开和关闭以使中心转子旋转并转动电机轴。步进电机可以提供连续运动或保持固定的转子位置,具体取决于系统要求。为了控制步进电机的扭矩或可闻噪声,根据步进算法的复杂性来实施“步进”模式。
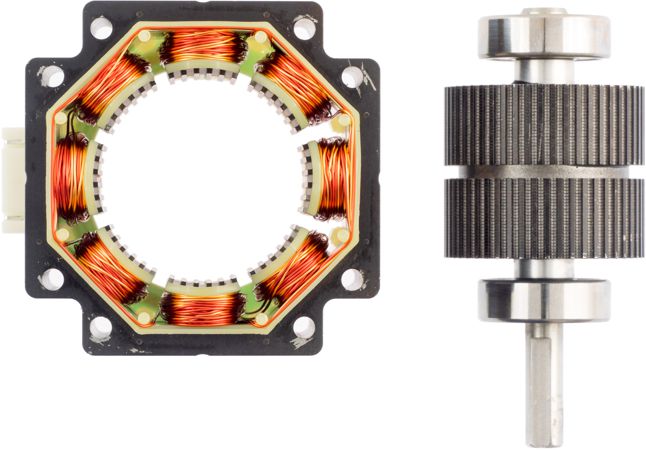 | 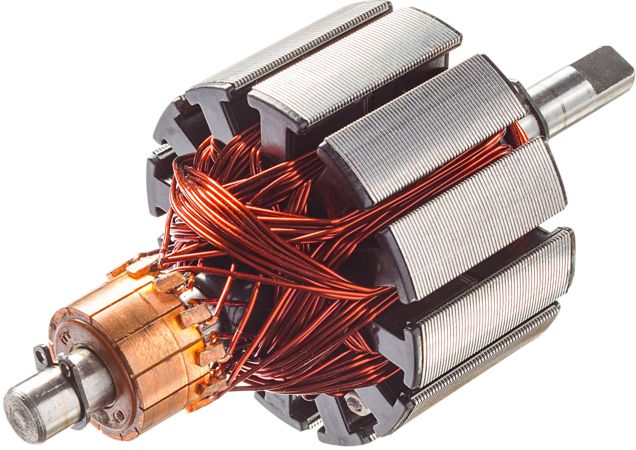 |
| 步进电机 | BDC 电机 |
H 桥驱动电路广泛用于控制步进电机和 BDC 电机。H 桥由四个开关(固态或机械)构成。可以通过控制这些开关管的通断来实现电机的正转、停止和反转。H 桥可以作为集成电路提供,也可以通过分立式元件构建。
") 图 1 H 桥驱动器(左侧:顺时针旋转,中间:停止,右侧:逆时针旋转)
图 1 H 桥驱动器(左侧:顺时针旋转,中间:停止,右侧:逆时针旋转)在这些与步进电机和 BDC 电机相关的应用中,用户必须精确控制电机转速、扭矩或其他变量,以满足实际应用的要求。因此,所使用的主要资源如下:
硬件
- 微控制器 (MCU):电机驱动器控制器可控制模拟数据采集,运行控制算法,监控电机状态并与其他米6体育平台手机版_好二三四通信
- 前置驱动器:功率级的前置驱动器
- 功率级:H 桥或双路 H 桥配置中具有多达 8 个 N 型 MOSFET(或 IGBT)
- 模拟前端:收集电机电压、电流、转速等
软件
- 应用程序:任务管理和调度
- 算法:根据电机的反馈和用户输入信号实时计算电机的驱动信号输出
可以使用 TI 器件、前置驱动器和 MOSFET 来实现这些功能。
| 电机 | MCU | 电机电压 | 前置驱动器(器件) | 功率级(开关类型) |
|---|---|---|---|---|
| 有刷直流 | MSPM0Lxx ARM Cortex M0+ 32MHz MCU | 1.65V 至 50V | H 桥电机驱动器(DRV82xx 系列) | |
| 5.5V 至 60V | H 桥栅极驱动器(DRV870x 系列) | MOSFET(CSD 系列) | ||
| 5V 至 115V | H 桥栅极驱动器(DRV877x 系列) | |||
| 4.5V 至 70V | 四路半桥驱动器(DRV89xx 系列) | |||
| 5V 至 115V | 半桥驱动器(UCC2xxx 系列、LMxxx 系列) | MOSFET、IGBT | ||
| 步进 | 1.65V 至 70V | 双路 H 桥步进电机驱动器(DRV84xx 系列) | ||
| 2V 至 65V | 双路 H 桥智能步进电机驱动器(DRV88xx 系列) | |||
MSPM0 为什么适用于步进电机和有刷直流电机控制?
米6体育平台手机版_好二三四 (TI) 的可扩展 M0+ MSPM0Lx 主流 MCU 具有片上电机控制外设,可为各种电机控制应用提供设计。MSPM0Lxxx 器件具有高达 32MHz 的 CPU 速度和 8KB 至 64KB 的闪存米6体育平台手机版_好二三四系列以及可扩展的模拟集成和电机控制外设,可用于步进电机和有刷直流电机设计。

- 32MHz M0+ CPU – 减少控制和检测信号的处理时间
- 1MSPS 12 位 ADC 模块(多达 10 个通道)– 检测 H 桥电流
- 两个零温漂斩波运算放大器 – 精确放大双路 H 桥电流
- 高速比较器 – 为电机实现快速电流保护
- 四个通用计时器 – 灵活的 PWM 控制和交叉触发器
- 同步和交叉触发器,用于生成多相电机控制 PWM
- 多达 8 个 PWM(可以驱动 4 个 BDC 电机或 2 个步进电机)
- 具有毛刺干扰滤波器的稳健 IO 设计 – 提供在电机噪声下可靠运行的系统
- 全面的通信接口 – 包括 UART、I2C、SMBus、SPI,可满足电机控制系统的所有通信要求。
- 具有引脚对引脚兼容器件的可扩展 MCU 米6体育平台手机版_好二三四系列涵盖了各种闪存选项。
- 小尺寸封装适用于空间受限的设计。
MSPM0 在有刷直流电机控制中有什么作用?
在有刷直流应用中,MSPM0 可以监控电机状态,运行算法并生成 PWM 来驱动电机(通过前置驱动器器件)。借助可扩展的模拟集成,MCU 可以快速计算出总线电压、电机电流和转速的准确值,然后为控制算法提供输入。MSPM0L13xx 可以生成 8 个 PWM,因此可以同时驱动 4 个 BDC 电机。
 图 2 用于有刷直流电机控制的 MSPM0L13xx 电机控制方框图
图 2 用于有刷直流电机控制的 MSPM0L13xx 电机控制方框图MSPM0 在步进电机控制中有什么作用?
在步进应用中,MSPM0 可以:
- 监控电机状态(可选)
- 运行 BDC 或步进电机控制算法
- 与栅极驱动器通信,以设置驱动器或微步进设置(可选)
- 生成 PWM 以驱动电机(通过预驱动器器件)。
借助可扩展的模拟集成,MCU 可以快速计算总线电压、电机电流和转速的准确值,然后为控制算法提供输入。MSPM0L13xx 可以生成多达 8 个 PWM 信号,因此可以同时驱动两个步进电机。
使用带 PWM 接口的步进驱动器的 MSPM0 步进控制
基本步进驱动器通常使用 PWM 接口进行步进控制,其中特定的 PWM 模式可以在控制步进电机位置的同时提供扭矩控制。为此,MSPM0 提供 4 个 PWM 输入信号,使用全步进或半步进换向模式来控制通过步进电机相位的相应电流。
此外,许多步进驱动器包括来自模拟输入信号的电流调节,这可以使用来自集成比较器的 MSPM0 的 8 位 DAC 输出来提供,以使电流曲线变得平滑。该拓扑适用于玩具、智能锁、机器人和安全摄像头等高扭矩或低精度步进应用。
 图 3 使用带 PWM 接口的步进驱动器的 MSPM0L1xxx 步进电机控制
图 3 使用带 PWM 接口的步进驱动器的 MSPM0L1xxx 步进电机控制使用带 STEP 接口的智能步进驱动器的 MSPM0 步进电机控制
在需要低噪声、精确控制或失速检测的高性能步进应用中,建议使用能够达到 1/256 微步进的智能步进驱动器。这些驱动器包括分度器以及先进的步进控制和保护算法,通常只需要一个 PWM 信号来驱动步进电机。
此外,这些驱动器可以接受用于电流调节的模拟输入,并且通常使用 SPI 接口来配置控制算法、器件设置和诊断系统级故障。MSPM0 可以通过提供 PWM 信号、用于电流调节的 8 位 DAC 输出电压与智能步进驱动器连接,并使用 SPI 接口与驱动器通信。该拓扑适用于打印机、ATM 机、舞台照明、办公室和家庭自动化、医疗应用和 3D 打印机等低扭矩和低噪声步进应用。
 图 4 使用带 STEP 接口的步进驱动器的 MSPM0L1xxx 步进电机控制
图 4 使用带 STEP 接口的步进驱动器的 MSPM0L1xxx 步进电机控制设计详情
- MSPM0-SDK 中的电机控制设计
- MSPM0 有刷直流库
- 支持 DRV82xx(电机驱动器)和 DRV87xx(栅极驱动器)器件
- 可扩展为适用于高压有刷直流应用的分立式驱动器拓扑
- MSPM0 步进库
- 支持用于基本全步进和半步进控制的 DRV84xx 集成驱动器
- 支持用于实现高达 1/256 微步进的 DRV88xx 智能驱动器
- MSPM0 有刷直流库
外设功能
- 计时器 – 生成 PWM 并检测霍尔传感器反馈
- 生成 PWM (TIMG)
- 配置 TIMG 实例之间的交叉触发器以生成多达 8 个 PWM
- 检测霍尔传感器反馈(可选)
将捕捉和比较 (CC) 输入与数字霍尔信号进行异或运算,创建频率发生器 (FG) 脉冲以进行转速计算
- 生成 PWM (TIMG)
- ADC – 检测电流和电压
- 启用具有多个通道的 1MSPS ADC 以检测电机电流和总线电压
- SPI – 与步进电机的栅极驱动器进行通信(可选)
- 与栅极驱动器通信以设置细分参数
- OPA – 标准 (STD) 模式
- 标准 (STD) 模式下的 GBW 为 6MHz
- STD 模式下的压摆率为 4V/µs
- STD 模式下的输入失调电压温漂为 6µV/°C
-
 图 5 用于电流检测的 MSPM0L13xx OPA 方框图
图 5 用于电流检测的 MSPM0L13xx OPA 方框图 - COMP – 高速模式
- COMP 中的 8 位 DAC 设置电流限制阈值,如果电流超过阈值,则 COMP 会向 CPU 产生一个中断。
- CPU 在接收到该中断时停止 PWM。
- DAC 稳定时间:静态模式下为 1µs
- COMP 响应时间:高速模式下为 40ns
- 计时器 – 生成 PWM 并检测霍尔传感器反馈
 图 6 用于电流保护的 MSPM0L13xx COMP 方框图
图 6 用于电流保护的 MSPM0L13xx COMP 方框图资源
立即订购 MSPM0 LaunchPad 开发套件和 DRV8xxx EVM,开始评估用于电机控制系统的 MSPM0。借助 MSPM0 代码示例和交互式在线培训,快速开始您的电机控制设计。
- MSPM0-SDK
- MSPM0 概述页面
- MSPM0 LaunchPad 开发套件
- MSPM0 Academy
- DRV8xxx EVM
- DRV8706S-Q1EVM(有刷直流控制)
- DRV8411AEVM(基本步进控制)
- DRV8889-Q1EVM(智能步进控制)
- TI 高精度实验室 - 电机驱动器:步进电机驱动器基础知识
- TI 高精度实验室 - 电机驱动器:有刷直流基础知识
- TI 高精度实验室 - 电机驱动器:H 桥